Studijní obory vyučované na naší škole a odbornost našich pedagogů poskytují přirozeně skvělé podmínky pro práci v dalších příbuzných oblastech, kterými jsou například robotika a mechatronika. Dokládají to úspěchy našich žáků a absolventů, kteří se pravidelně zůčastňují a obsazují čelná místech v národních i mezinárodních soutěžích.
Novinky
V pocovidových letech došlo k ohromnému posunu ve výuce mechatroniky i v souvisejícím robotickém klubu.
Cíleně jsme pořídili průmyslové prvky a sestavy a nahradili jimi hračkové pomůcky z našich začátků. Jde nejen o široké zastoupení elektropohonů a jejich driverů, ale i o další elektropneumatické prvky a nově o sestavu pro práci s vakuem. Také v oblasti senzoriky a řízení jsme doplnili startovací FESTO panely o desítky dalších prvků Balluff a SMC.
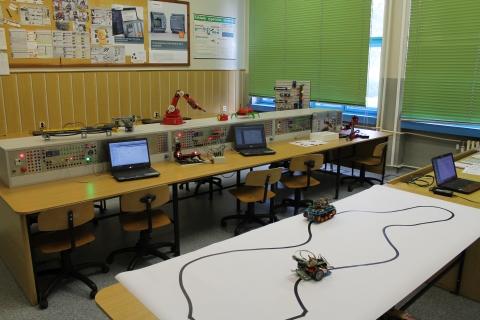
Sledovač čáry a další níže uvedené roboty dnes používáme především pro prezentaci žákům základních škol. V rámci klubu robotiky a probíhajících projektů žáci pracují s průmyslovou demonstrační sestavou, kterou přestavují na nové stroje. Ten aktuální si sami navrhli jako třídící linku, kterou postupně programují a doplňují o další funkce.

Bezesporu nejúspěšnějšími v tomto oboru jsou naši absolventi bratři Nezvalové. Starší Tomáš vyhrál celostátní kolo SOČ se svým automatickým rybářským prutem a poté reprezentoval Českou republiku třetím místem na soutěži INTEL ISEF v USA.

Mladší Jan Nezval byl aktivní od prvního roku studia, kdy postupně postavil dálkově ovládaného pavouka, robotickou ruku, soupravu pomůcek na výrobu DPS, portálovou cnc frézku a nakonec robotickou ohýbačku drátu. Také on vyhrál celostátní SOČ a na Intel ISEF skončil čtvrtý.


Od září 2016 byla zahájena výuka na nové učebně mechatroniky a robotiky. Jejím základem je šest pracovišť vybavených panely osazenými PLC Siemens LOGO! a Siemens Simatic. Díky modularitě k nim lze připojovat další prvky odpovídající probíraným úlohám.
Pro názornou demonstraci slouží panely pneumatiky Festo a několik robotických stavebnic Fischertechnik a LOGO Technic.
Ve škole ale proběhlo anebo stále běží mnoho daších projektů. Víceméně jednorázovou akcí byl (úspěšný) pokus o přestavbu mikrofrézy Proxxon na CNC řízení a prezentace tohoto projektu na Přehlídce středních škol.
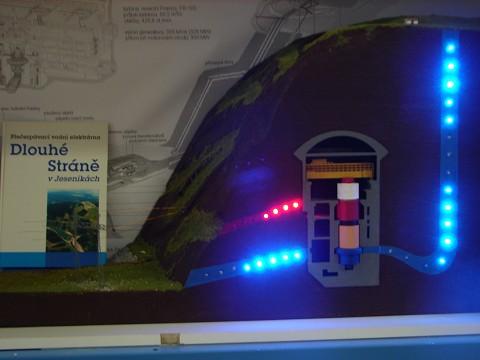


V souvislosti s dobíhajícím projektem Regenerative Energien vznikly modely solární, větrné a přečerpávací vodní elektrárny. V nich jsme poprvé použili čip PICAXE pro řízení diod znázorňujících tok vody a energie. Navíc jsme pořídili kráčejícího solárního robota neboli BEAMBOTa.
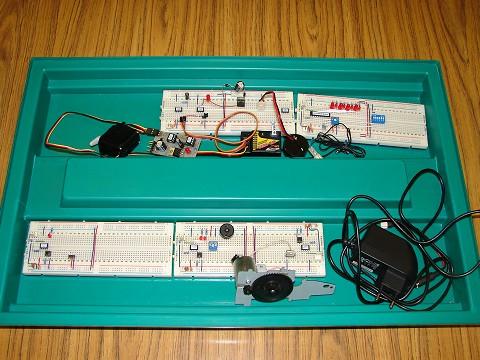
Pokusy s čipy PICAXE pokračují v rámci kroužku robotiky, kdy jednak ověřujeme a modifikujeme převzatá zapojení, ale také tvoříme zcela nové projekty.

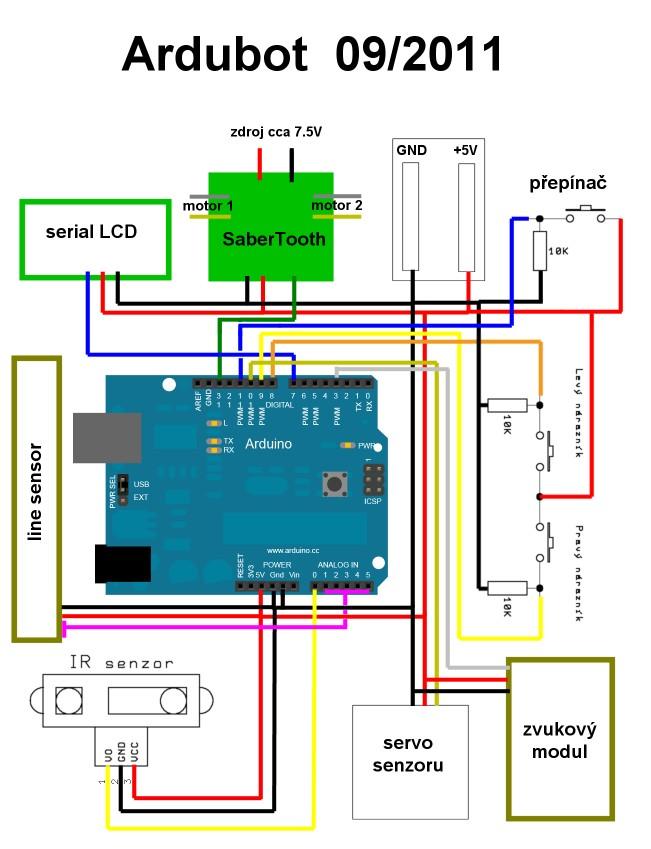
V létě 2011 se nám podařilo získat stavebnici robota Umík 28 a Ardubota. Umík je řízen výkonným procesorem PICAXE a v základní konfiguraci může pracovat jako sledovač čáry nebo zápasník v minisumo. Ardubot je mobilní senzorovou platformou řízenou deskou Arduino Duemilanove, poháněnou (a napájenou) modulem Sabertooth a vybavenou sériovým LCD displayem, otočným dálkoměrem, taktilními čidly a zvukovým modulem imitujícím (v závislosti na aktuální rychlosti) dieslový motor.

Klub robotiky
Klub robotiky působící na naší škole má k dispozici několik robotů. Jsou to jednak koupené sestavy, u kterých těžíme ze spolehlivosti hardware a učíme se je programovat, a samozřejmě také vlastní výrobky, které naopak slouží jako neustále přestavované platformy pro pokusy se senzory a zkoušení nových technologií.
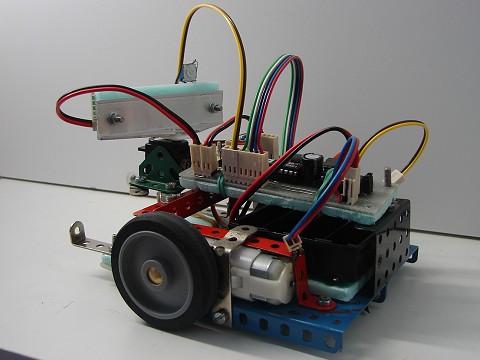
První
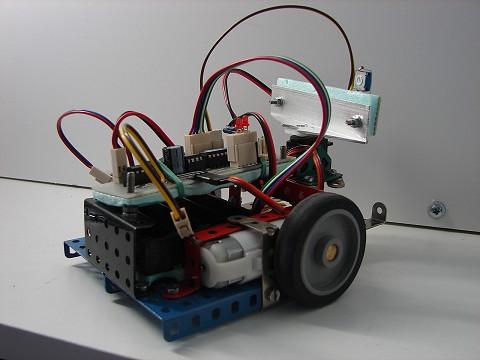
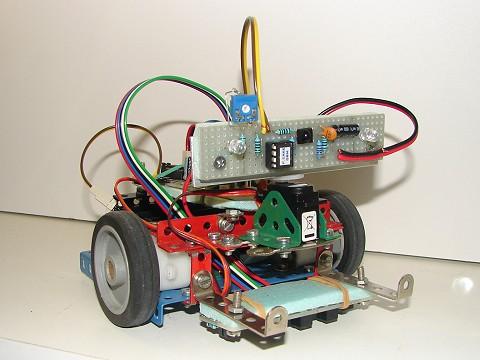
Tento bezejmenný robot vznikl jako úplně první pokus o využití procesoru PICAXE k řízení robota. Pohon s diferenciálním řízením obstarávají dva motorky s převodovkami, na kterých jsou nasazena kola z podavače staré tiskárny. Tělo tvoří různě pospojované díly stavebnice Merkur. Napájeno čtyřmi AA články.
Robot nejprve dostal senzory (5 x CNY70) pro sledování čáry, poté čidlo překážky (dvě infradiody + modulovaný senzor), později otočně posazené na servo.
Jízda po čáře je velmi spolehlivá, ale díky zvolené motorizaci dosti pomalá. Čidlo překážky funguje dobře, ale logika vyhýbacího algoritmu je limitována možnostmi použitého procesoru.
Chodec a brouci
Robot chodec byl zakoupen jako stavebnice v souvislosti s projektem Regenerative Energien. Později přibyly ještě další miniroboty na solární pohon.
Smyslem těchto neřízených pomůcek je jednak studium využití solární energie, ale hlavně navrhování energeticky úsporných („green“) řešení v rámci enviromentální výchovy a trvale udržitelného rozvoje.



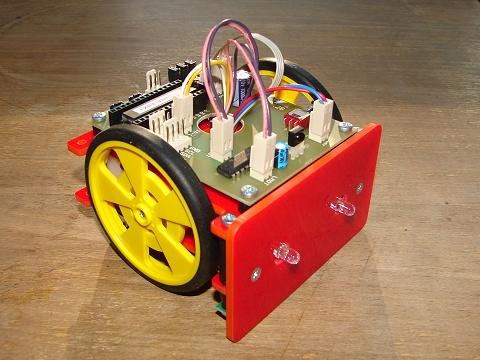
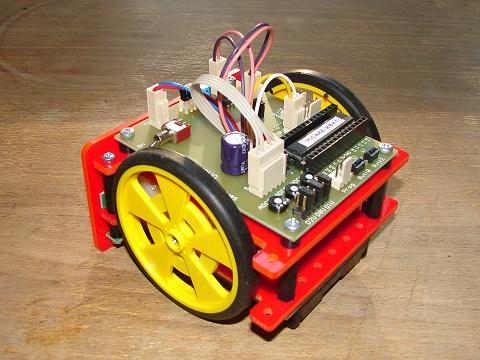
Umík 28
Umík 28 patří k nejnovějším přírůstkům. Jeho uspořádání ho předurčuje ke sledování čáry případně jako zápasníka robotického minisumo. Je řízen vylepšenou verzí procesoru PICAXE a může být tedy snadno opakovaně přeprogramováván při pokusech našich žáků.
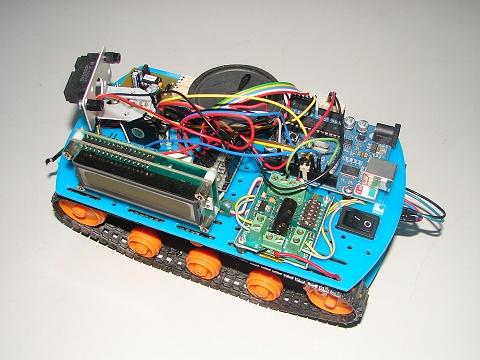
Ardubot
Inspirací pro stavbu Ardubota byly bezpochyby články v magazínu Robot Revue, následované mailovými kontakty s jejich autorem. Na jejich základě jsme potom získali mobilní senzorovou platformu postavenou na podvozku tank firmy Tamia, řízenou deskou Arduino Duemilanove. Napájení a řízení motoru obstarává modul Sabertooth. Ostatní součásti se průběžně obměňují – za zmínku stojí zvukový modul postavený podle vlastního návrhu a čidlo čáry s nezávislou kalibrací jednotlivých členů.
Tento robot je neustále měněn a upravován, takže fotografie a modulové schéma odpovídají stavu ze září 2011. Navíc samotné Arduino je využíváno pro další pokusy např. s průmyslovými sběrnicemi.